Lendrobotid õpivad kärbestelt, nahkhiirtelt ja prussakatelt
Kui teid hammustab sääsk, nõelab herilane või sumiseb öösel teie pea kohal tüütu kärbes, laskmata uinuda, siis võib juhtuda, et tahaksite kogu putukate soo maamunalt kaotada. Kuid stopp! Kellelt siis õpiksime, kuidas ehitada lennumasin, mis vaat et ei tahakski kütust, kulgeks hääletult ja suudaks välja nuuskida pahurlaste saladused või üles leida varisenud kaevandustesse lõksu jäänud kaevurid?
Juba vennad Wrightid, kes 17. detsembril 1903 lendasid esimesena edukalt õhust raskema lennumasinaga, uurisid võimalust, kas ei saaks selle ehitamiseks näpata teavet lindudelt või putukatelt. Kuid nende võrranditest tuli välja, et putukad ei tohiks üldse lennata.
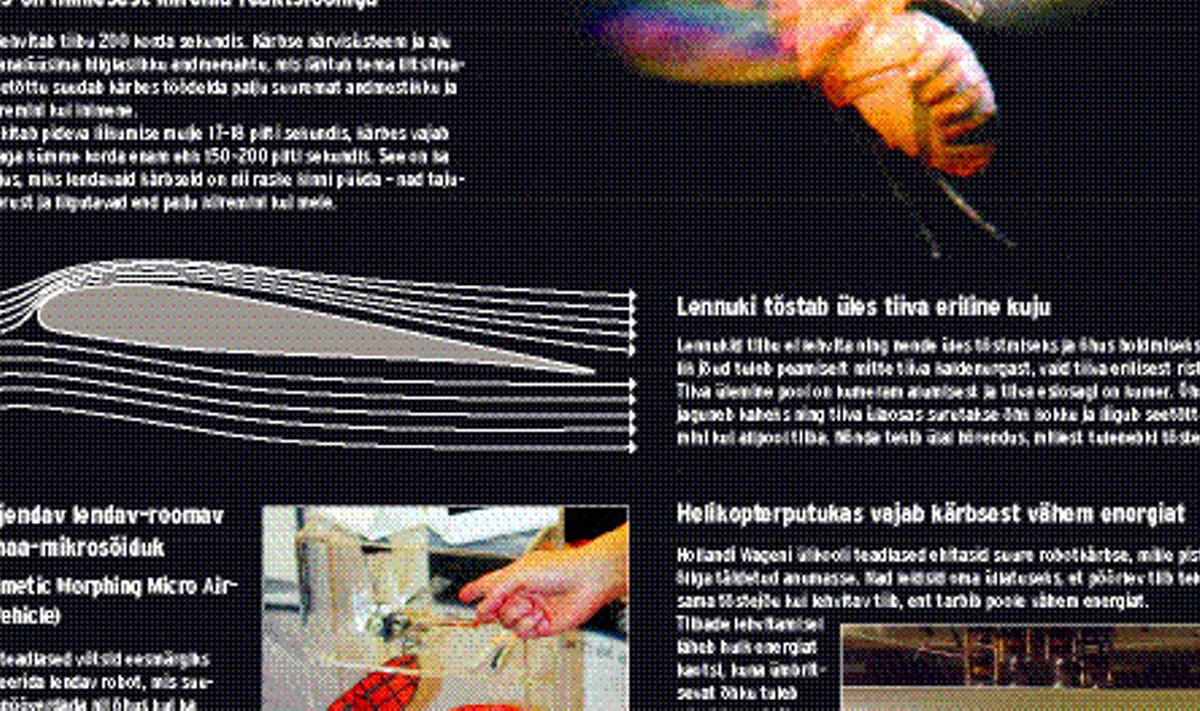
Lennukid tiibu ei lehvita ning nende õhku tõstmiseks ja õhus hoidmiseks vajalik jõud tuleb peamiselt mitte tiiva kaldenurgast, vaid erilisest ristlõikest. Tiiva ülemine pool on alumisest kumeram ja tiiva esiosagi on kumer. Õhuvool jaguneb kaheks ning tiiva ülaosas surutakse õhk kokku ja liigub seal seetõttu kiiremini kui allpool tiiba. Sellest tekibki tõstejõud.
Kärbes on korraldanud oma lennu teisiti. Tal on ka lahendada teistsugune ülesanne. Raske lennuk peab võitlema gravitatsiooniga, kärbsele ei ole see nii suur probleem. Kui ta ka maha kukub, ei saa ta ometi viga. Kär-bes on omaenese langevari. Kui meetrise läbimõõduga kera saavutab õhus kukkudes stabiilse kiiruse 1821 kilomeetrit tunnis, siis millimeetrise kerakese puhul on seda vaid 21 kilomeetrit tunnis.
Loodus ja insener lähenevad liikumisele eri nurga alt. Insener kasutab ratast, telge, kuullaagrit ja sidurit, loodus aga lihased ja painduvaid hingi. Kärbes lehvitab oma tiibu 200 korda minutis, ent tal pole kuullaagreid. Tiibade liikumise tagab hing, mis on tehtud resiliinist, väga elastsest materjalist. Säärane hing peab purunemata vastu miljoneid paindumisi.
Mustrid, mille järgi kärbse tiivad õhus liiguvad, on keerulised, sest tiivad suudavad muuta ka oma nurka. Lihtne üles-alla lehvitamine ei tekitaks palju tõste-jõudu, sest tiibadele suunatud jõud keskmistuvad peaaegu nulliks. Nõnda joonistab kärbse tiivatipp õhus kaheksaid.
Kärbse närvisüsteem ja aju peavad analüüsima hiiglaslikku andmemahtu, mis lähtub tema liitsilmadest. Seetõttu suudab kärbes töödelda inimesest palju kiiremini palju rohkem andmeid. Meile tekitavad pideva liikumise mulje 17–18 pilti sekundis, kärbes vajab selleks aga kümme korda enam ehk 150– 200 pilti sekundis. See on ka üks põhjus, miks lendavat kärbest on nii raske kinni püüda – ta tajub ümbritsevat ning liigutab end palju kiiremini kui meie.
1999. aastal alustas USA kaitseprojektide agentuur Darpas projekti, millega loodeti saada lennumasin, mis mahuks 15-sentimeetrisesse kerasse, ei kaaluks üle 140 grammi, lendaks kuni kaks tundi ja oleks võimeline manööverdama ise, kaugel juhtimiskeskuses oleva piloodi abita. Kaks meeskonda üritas leiutada tiibu lehvitavat lennumasinat. Projekt lõpetati 1999. aastal tulemusteta, kuid sellesuunalised tööd kestavad eri laborites edasi.
Asjaga tegeldakse ka Bristoli ülikooli robootikalaboris, mis demonstreeris oma tillukest lennumasinat juuli alul Londonis toimunud Briti kuningliku ühingu suvenäitusel.
Bristoli teadlased olid võtnud eesmärgiks konstrueerida lendav robot, mis suudaks manööverdada nii õhus kui ka maal ehk siis lennata ja roomata. „Loomade lihased, skelett ja närvisüsteem kokku võimaldavad kontrollida, kuidas ta liigub ja ümbritseva maailmaga suhtleb,” selgitas Bristoli ülikooli teadlane Ravi Vaidyanathan, „see annab robotite disainiks palju inspiratsiooni ja meie kasutame loomi kui mudeleid, uurime, kuidas nad kohastuvad, ja õpime neilt.”
Nahkhiire ja prussaka ühendus
Loomad, keerulised ja tõhusad süsteemid, kasutavad hierarhilisi struktuure, et midagi keskusest juhtida, ent töötlevad iga taseme informatsiooni. Ideaalse lennumasina saaks, kui kombineerida mehaanikat neurofüsioloogiaga. Bristolis on disainitud palju eri roboteid alates närivast robotist, millega saab katsetada kunstlike hambavaapade tugevust, ja kätt lehvitavast robotist tehiskäte uurimise tarbeks kuni lendrobotini välja. See keerulise nimega robot, Biomimetic Morphing Micro Air-Land Vehicle ehk biojäljendav lendav-roomav õhk-maa-mikrosõiduk töötati välja koos USA kolleegidega Florida ülikoolist.
Londonis akadeemia saalis lendrobotit lahti ei lastud, see puhkas klaasvitriinis. Küll aga võis näha roboti lendu videosalvestiselt. Tõepoolest, lendrobot suutis ise katuselt õhku tõusta, üsna keerulist trajektoori pidi lennata, maanduda ja seejärel veel edasi roomata. „Võtsime eeskuju nahkhiirest ja prussakast,” ütlevad Vaidyanathan ja tema kolleegid naerdes.
Nahkhiir ja prussakas aitasidki hädast välja. See on seni ainus inimese ehitatud robot, mis suudab kõike loetletut. 2004. aastal alanud projekti käigus loodetakse välja töötada närvisüsteemi moodi kontrollsüsteem. Tõsi küll, lendrobot kasutab jõuallika otsas siiski propellerit, mida nahkhiirtel teadupärast võtta pole.
Lendroboti tööpõld on teada: luurata, luurata, luurata. Olgu siis vaenlaste või maavärinate, kaevandusõnnetuste või muude hädade tõttu lõksu jäänud inimeste järele.
Siiani on arvatud, et lennukite või helikopteritena lendavad minirobotid tarbivad kärbestest suhteliselt enam energiat, sest kärbestel aitab tiibadega vehkimine paremini õhus püsida. Seepärast on püütud ehitada ka tiibu lehvitavaid miniroboteid. Asja uuris hiljuti Hollandi Wageningeni ülikooli lennuinsener David Lentink koos California tehnoloogiainstituudi bioloogi Michael Dickinsoniga.
Nad ehitasid robotkärbse ja pistsid selle õliga täidetud anumasse. Oma üllatuseks leidsid nad, et pöörlev tiib tekitab sama tõstejõu kui lehvitav tiib, ent tarbib poole vähem energiat. Tiibu lehvitades läheb energiat kaotsi, sest ümbritsevat õhku tuleb edasi-tagasi kiirendada. Pöörlev tiib tekitab stabiilse tornaadosarnase keerise, mis kulgeb tiiva esiosaga paralleelselt. See keeris alandab rõhku tiiva kohal ja imeb selle üles, tõstes putuka õhku.
Siiski on kärbestelt palju õppida. Kui inimese ehitatud tehiskärbsed suudavad õhus püsida sekundeid või minuteid, siis päris kärbes võib vabalt lennata tundide viisi. Kui neil on nõnda tõhus energia kogumise süsteem ja tiibade liigutamise motoorika, siis ei sõltu nad nii palju energeetilisest tõhususest.
Esimene helikopterilend toimus 1907. aastal, kui prantslased Jacques ja Louis Breguet olid ehitanud helikopteri, mis tõstis piloodi maast minutiks poole meetri kõrgusele. Nüüd siis püütakse neidki lennumasinaid tillemaks teha.